
SPM1300E/3DMachina Pictoria Robotica

Gen.Introductio generalis Machinae Pictoriae Roboticae
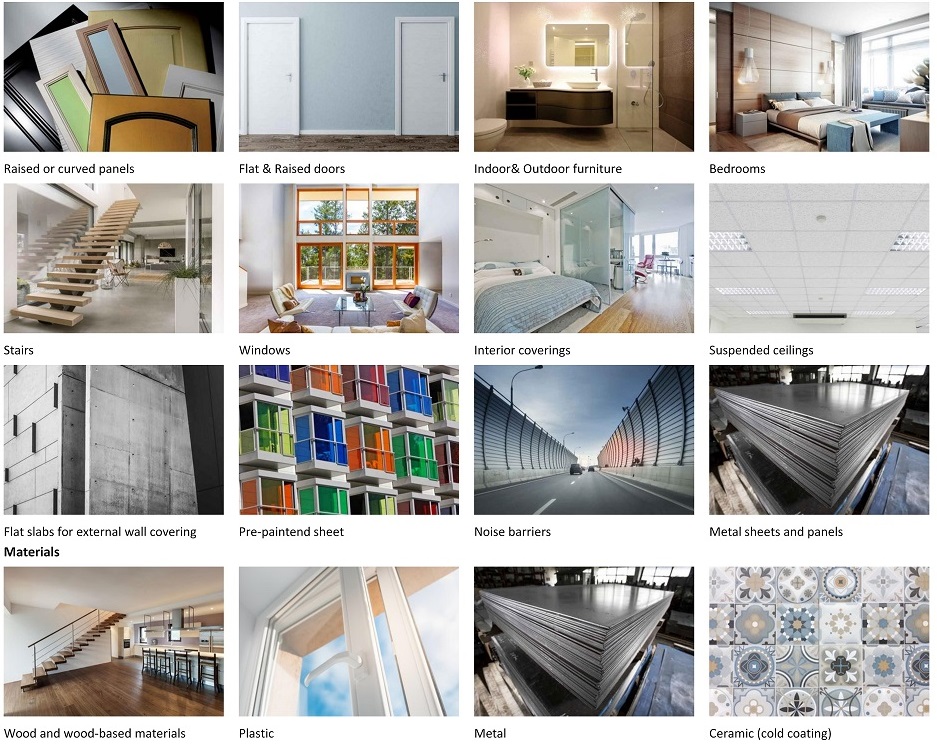
Machina pingendi robotica specialiter designata est ad varias tabulas planas et curvas, ut tabulas ligneas, ianuas planas, ianuas elevatas, ianuas armarii, scalas et alias partes supellectilis pulverizandas.
- Machina pingendi automatica permittit sclopetis pingendis quinque axibus (X, Y, Z, A, B) operari;
- Motus sclopeti programmari possunt: motus linearis secundum axes X, Y, Z progreditur, motus autem rotationis circa axes verticalem (A) et horizontalem (B) fit;
- Gratias facultati fulcimentum sclopetorum secundum axem "z" aptandi, altitudinem sclopetorum pictoriorum constituere licet, et ita elementa cum crassitudinibus diversis pingere licet.
- Secundum genus partium pingendarum, fieri potest ut methodus pingendi aptetur, ut perfecta uniformitas et qualitas pingendi obtineatur.;
- Caput pingendi permittit institutionem usque ad quattuor sclopetorum pingendi automatariorum; numerus sclopetorum pingendi pulverisatorum institutorum et earum functio (e.g. rotatoria vel fixa) a specificis processus pingendi pendet;
- Celeritas capitis pictoris usque ad100 m/min in plano horizontali (secundum axes X et Y) et usque ad 30 m/min in plano verticali (secundum axem Z);
- Sclopeta automatica pigmenti aspergendi, quae materiam cum parametris operandi praefinitis adhibent, iacturam materiae pigmenti ad minimum reducent, tempus processus pingendi et lassitudinem filtri minuunt;
- Cella pulverisatoria vitrea cum systemate filtrationis aeris etintusilluminatio permittit continuam moderationem processus pingendi;
- Ostium servitii aditum ad interiora machinae pingendi facilitat, quod in systemate clausurae in casu necessitatis machinae pingendi, si ea durante operatione aperiatur, incorporatum est;
- Designatio compacta machinae pingendi una cum accessionibus et apparatu spatium requisitum ad machinam instituendam et operationes currentes ad minimum redigit;
- Systema automaticum recuperationis picturae et systema purgationis sclopeti pulverisatoris adhibentur;
- In cellis pictoriis iam exstantibus cum systemate permutationis aeris praeinstallato installi potest.
Proprietates Machinae Pictoriae Roboticae
Operationes Machinarum Automatarum
- Tactus operatoris tabula celerem, simplicem et intuitivam machinae pingendi operationem praestat;
- Magnitudo scrinii operatoris (diagonalis: 15″) permittit ut omnes informationes necessariae et parametra ad operationes machinae pingendi pertinentia videantur;
- Varia programmata pingendi quae processum pingendi margines, superficies laterales et superficies elementorum specificorum pingendorum definiunt, servari et deinde eligi possunt;
- Tabula operatoris prope aream onerandi sita est;
- PLC efficientem et sine difficultate machinae operationem praestat;
- Operatio eius nullam peritiam specialem pingendi et/aut programmandi requirat;
- Numerus operariorum optime electus, pro vi operandi instrumentorum (duobus hominibus), sumptus operariorum insigniter minuit;
- Positio servitii capitis pingendi operationem continuam instrumenti pingendi permittit;
- Servitium interretiale praesto est si machina pingendi interreti coniuncta est.
- Margines et sulci ianuarum semel vel pluries pingi possunt; superficies decusse verniciari possunt ut optimi eventus obtineantur;
Materia Pictoria et Circuitus
- Machina robotica ad aspergendum destinata est ad applicationem variorum generum materiarum pictoriarum et glutinis, ut puta:
- Tincturae ligneae: aqua, nitro, spiritu, solventibus fundatae;
- Vernices: polyurethanum, polyesterum, acrylicum, aqua et aqua UV;
- Glutina liquida: gluten pro prelo membranae.
- Materiae pictoriae adhiberi possunt tamquam pars technologiae pressionis humilis et/vel altae;
- Usque ad duo circuitus pictorii sine circulatione materiae pictoriae institui possunt; numerus circuituum pictoriorum pro singulis processibus pictoriis et materiis pictoriis optime eligitur;
- Numerus circuituum pingendi pro specificis processibus pingendi et materiis pingendis optime eligitur;
- Parva receptacula pressionis humilis brevi spatio a sclopetis poni possunt ut tempus in mutando colore vel genere laccae servetur et iactura materiarum laccae inter tales mutationes quam minima sit;
- Glutina liquida ad pelliculas glutinosas similes finitioni in prelis membranaceis adhiberi possunt.
Systema Vecturae
- EiocosecumTypus aciculivel Catenaconvectorest facultativum
- Ferculum clavorum aptissimum est glutinibus et coloribus non recuperabilibus, quod sumptus abjectionis ferculi conservat, et partem inferiorem tabularum perfecte mundam servat, atque applicationem immaculatam et uniformem in margine et facie praestat.
- Convector catenae instructus est repugnantibusTeflonchalybs obductus, amateria anti-adhaesiva – facile purganda. Haec optima est adapplicatio glutinis adhaesivi
- Optionaliter inclusum provecturae importationis et egressionis. Hae ambae vecturae motorizatae sunt et a PLC machinae reguntur.
Lector Lectorius Visionis Tridimensionalis et Systema Auto-Programmationis
- TheCamera laserica tridimensionalis totum productum perscrutabiturcum pascit, et signum eventus ad systema moderationis transferre;
- Thespecialisprogrammaturavoluntas rsulcos fresatos legendoet margines (margines interiores et exteriores) in unaquaque tabula et acquisitionem formae, magnitudinis et positionis partis laborandae altae definitionis curat, programmate moderatorio permittens optimas trajectorias spargendi delineare.
- Se ipsum programmabit ut ad singulorum necessitates aptatum erit, fortassebis oras asperge(marginibus interioribus et exterioribus)et sulcos fresatos, dum superficiem semel tantum aspergit
Tabula distributionis electricae et moderatoriae
- Apparatus electricus commutationis et armarium moderationis in eodem armario integrati sunt;
- Spatium circa machinam et aream laboris optimizatur;
- Periculum damni mechanici systematibus electricis et moderandis ab operatore machinae ad minimum redigitur.
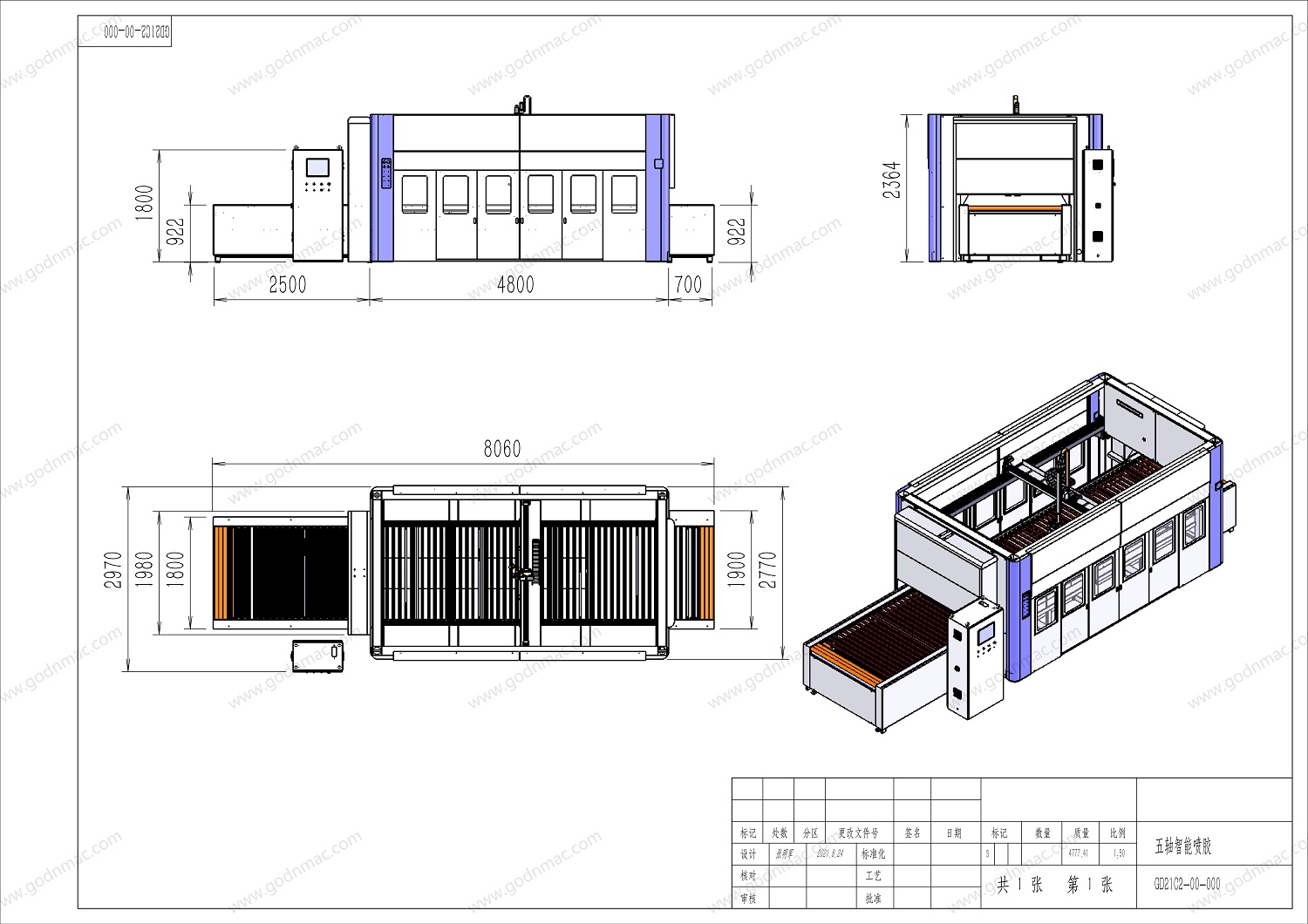
Vestigium Machinae Pictoriae Roboticae
Applicatio Machinae Pictoriae Roboticae
Parametri Technici Machinae Pictoriae Roboticae
| Dimensio Maxima Operativa | 2500x1300x200mm |
| Pondus Maximum Operativum | 50 chiliogrammata |
| Celeritas Motus Sclopeti | 100m/minutum |
| Potentia Totalis | 5.05kW |
| Pressio aeris compressi | 0.6-0.8Mpa/6-8Bar |
| Consumptio aeris compressi | 100 l/min (sclopetis pigmenti aspergendis exceptis) |
| Efficacia Laboris | 1.5-3 minuta per aream laboris |
| Tempus immissionis elementorum in aream laboris | Decem secundae |
| Operator | Duae personae |
| Pondus | 3500 kg |
| Dimensio Totalis | 8000*2970*3000mm |

Tempus publicationis: XXVII Decembris MMXXI