
SPM1300E/3DMachin penti robo

JenEntwodiksyon jeneral machin penti robo
Machin penti robo a fèt espesyalman pou flite divès panèl plat ak koube, tankou panèl an bwa, pòt plat, pòt ki wo, pòt kabinèt, eskalye ak lòt konpozan mèb.
- Machin penti otomatik la pèmèt zam penti yo opere sou senk aks (X, Y, Z, A, B);
- Mouvman zam yo pwogramab: mouvman lineyè ale sou aks X, Y, Z epi mouvman wotasyon ale sou aks vètikal (A) ak orizontal (B);
- Gras a posiblite pou ajiste sipò zam yo sou aks "z" la, li posib pou fikse wotè zam penti yo, e konsa li posib pou pentire eleman ki gen diferan epesè.
- Selon kalite pyès ki pou pentire a, li posib pou pèsonalize metodoloji penti a pou jwenn yon inifòmite ak yon kalite penti pafè.;
- Tèt penti a pèmèt enstalasyon jiska 4 zam penti otomatik; Kantite zam penti espre ki enstale ak fonksyonalite yo (pa egzanp, rotary oswa fiks) depann de espesifik pwosesis penti a;
- Vitès tèt penti a rive jiska100 m/min nan plan orizontal la (sou aks X ak Y yo) epi jiska 30 m/min nan plan vètikal la (sou aks Z la);
- Pistolet espre penti otomatik ki aplike materyèl ak paramèt travay predetèmine minimize pèt materyèl penti, diminye tan pwosesis penti a ak fatig filtre a;
- Yon kabin espre glase ak yon sistèm filtraj lè akanndanekleraj pèmèt kontwòl kontinyèl sou yon pwosesis penti;
- Pòt sèvis la fasilite aksè nan enteryè machin penti a ki enkòpore nan sistèm are ijans machin penti a nan ka ta gen ouvèti li pandan operasyon;
- Konsepsyon kontra enfòmèl ant machin penti a ansanm ak akseswa ak ekipman yo minimize kantite espas ki nesesè pou enstalasyon machin nan ak operasyon aktyèl yo;
- Sistèm otomatik pou rekipere penti ak sistèm netwayaj zam espre aplike;
- Li ka enstale nan kabin penti ki deja egziste ak yon sistèm echanj lè preenstale.
Karakteristik machin penti robo
Operasyon Machin Otomatik
- Ekran taktil operatè a asire yon operasyon rapid, senp ak entwisyon nan machin penti a;
- Gwosè ekran operatè a (dyagonal: 15″) pèmèt ou wè tout enfòmasyon ak paramèt nesesè ki gen rapò ak operasyon machin penti a;
- Ou ka sove epi chwazi plizyè pwogram penti ki defini pwosesis pou pentire bor, sifas bò ak sifas eleman espesifik pou pentire;
- Panèl operatè a sitiye toupre zòn chajman an;
- PLC a asire operasyon efikas e san pwoblèm nan machin nan;
- Operasyon li yo pa mande okenn ekspètiz espesyal nan penti ak/oswa pwogramasyon;
- Yon kantite pèsonèl operasyonèl ki chwazi yon fason optimal selon entansite operasyonèl ekipman an (2 moun), diminye depans anplwa yo anpil;
- Pozisyon sèvis tèt penti a pèmèt ekipman penti a kontinye fonksyone;
- Sèvis sou entènèt disponib si machin penti a konekte ak Entènèt la.
- Ou ka pentire kwen ak rainur pòt yo yon fwa oubyen plizyè fwa; ou ka vèni sifas yo yon fason kwaze pou jwenn pi bon rezilta yo;
Materyèl Penti ak Sikui
- Machin espre robotik la fèt pou aplikasyon divès kalite materyèl penti ak adezif, tankou:
- Tach bwa: dlo, nitro, alkòl, ki baze sou sòlvan;
- Vèni: poliuretan, polyester, akrilik, dlo ak dlo UV;
- Adezif likid: lakòl pou près manbràn lan.
- Yo ka aplike materyèl penti kòm yon pati nan teknoloji presyon ki ba ak/oswa presyon ki wo;
- Yo ka enstale jiska 2 sikwi penti san sikilasyon materyèl penti a; Yo chwazi kantite sikwi penti yo yon fason optimal pou pwosesis penti espesifik ak materyèl penti;
- Yo chwazi kantite sikwi penti yo yon fason optimal pou yon pwosesis penti ak yon materyèl penti espesifik;
- Yo ka enstale ti tank ba presyon nan yon ti distans ak zam yo pou ekonomize tan pou chanje koulè oswa kalite lak epi minimize pèt materyèl lak pandan chanjman sa yo;
- Yo ka aplike adezif likid pou kole fim fini sou près manbràn.
Sistèm Transporteur
- EblagavèkKalite penyoswa Chènkonveyèse opsyonèl
- Transporteur tip peny lan se solisyon pafè a pou lakòl ak penti ki pa ka refè. Li ekonomize sou depans pou jete transporteur yo, li kenbe anba panno yo parfe pwòp epi li garanti yon aplikasyon inifòm ak san tach sou kwen ak sou fas la.
- CONVEYOR chèn lan ekipe ak anti-adezifTeflonasye kouvri, yonmateryèl anti-adezif - fasil pou netwaye. Sa a bon pouaplikasyon lakòl adezif la.
- Si ou vle enkli pouCONVEYOR antre ak sòti yo. Toulede CONVEYOR sa yo se CONVEYOR ki mache ak motè epi PLC machin nan kontwole yo.
Eskanè lekti vizyon 3D ak sistèm oto-pwogramasyon
- LaKamera lazè 3D a pral eskane tout pwodwi alè w ap bay manje, epi transfere siyal rezilta a nan sistèm kontwòl la;
- Laespesyallojisyèlpral rlekti rainur ki fèt ak routeurak bor (bor anndan ak deyò) nan chak panèl epi li asire akizisyon fòm, gwosè ak pozisyon pyès travay la an wo definisyon, sa ki pèmèt lojisyèl kontwòl la trase pi bon trajektwa flite yo.
- Li pral oto-pwogramasyon jan li Customized, kapabflite bor yo de fwa(bò anndan ak deyò)ak rainur yo ki fèt ak machin nan, pandan w ap flite sifas la yon sèl fwa
Tablo distribisyon elektrik ak kontwòl
- Ekipman switch elektrik ak kabinè kontwòl yo entegre nan menm kabinè a;
- Espas otou machin nan ak zòn travay la optimize;
- Operatè machin nan minimize risk pou domaj mekanik nan sistèm elektrik ak kontwòl yo.
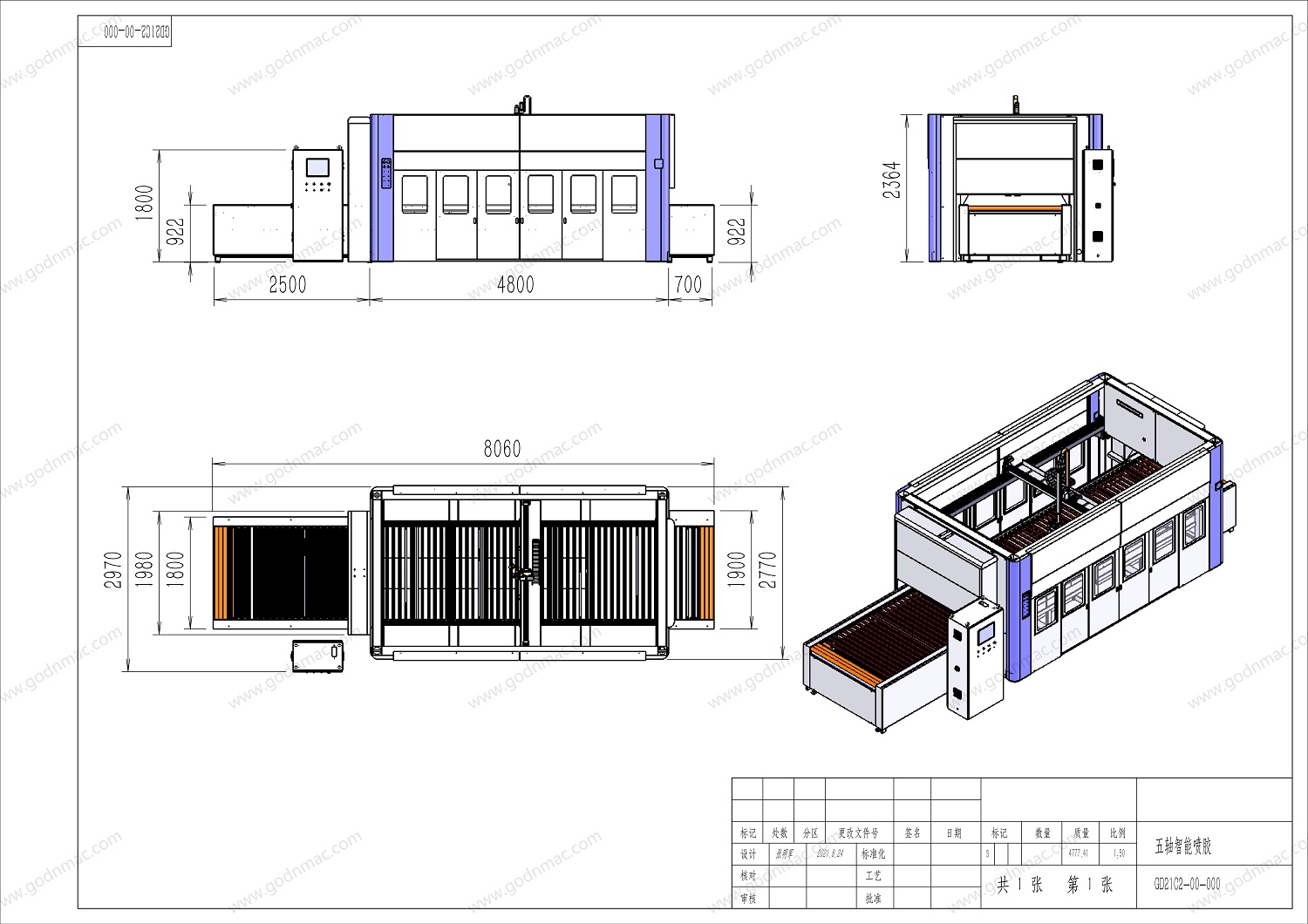
Anprent machin penti robo a
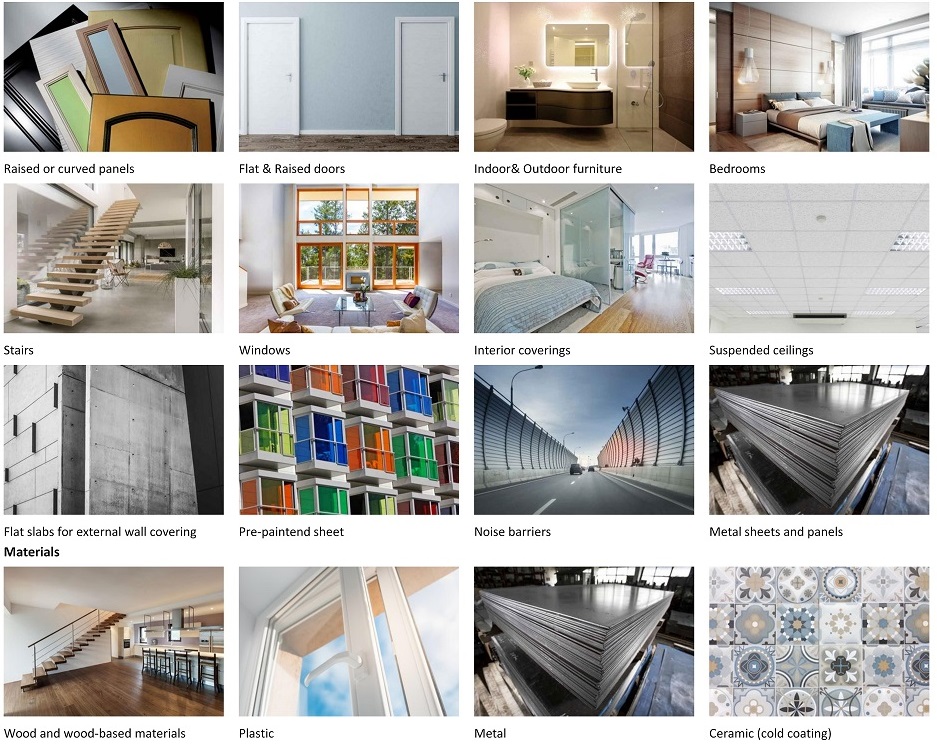
Aplikasyon machin penti robo
Paramèt teknik machin penti robo a
| Dimansyon maksimòm travay | 2500x1300x200mm |
| Maksimòm Pwa Travay | 50kg |
| Vitès Mouvman Zam | 100m/minit |
| Pouvwa Total | 5.05kw |
| Presyon lè konprese | 0.6-0.8Mpa/6-8Bar |
| Konsomasyon lè konprese | 100 l/min (eksepte zam penti espre) |
| Efikasite Travay | 1.5-3 minit pou chak zòn travay |
| Tan pou mete eleman yo nan zòn travay la | 10 segonn |
| Operatè | 2 moun |
| Pwa | 3500kg |
| Dimansyon jeneral | 8000 * 2970 * 3000mm |

Dat piblikasyon: 27 Desanm 2021